Leetcode 490. The Maze (Python)
Related Topic
Description
There is a ball in a maze with empty spaces and walls. The ball can go through empty spaces by rolling up, down, left or right, but it won’t stop rolling until hitting a wall. When the ball stops, it could choose the next direction.
Given the ball’s start position, the destination and the maze, determine whether the ball could stop at the destination.
The maze is represented by a binary 2D array. 1 means the wall and 0 means the empty space. You may assume that the borders of the maze are all walls. The start and destination coordinates are represented by row and column indexes.
Sample I/O
Example 1
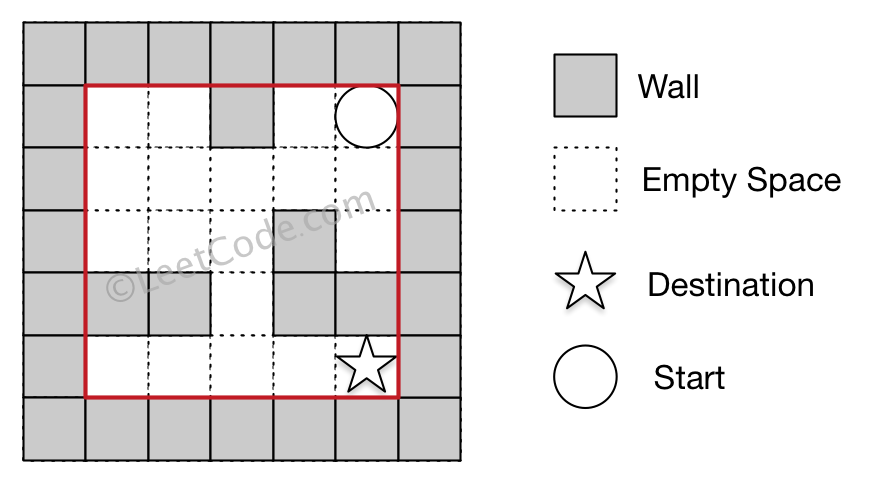
Input 1: a maze represented by a 2D array
0 0 1 0 0
0 0 0 0 0
0 0 0 1 0
1 1 0 1 1
0 0 0 0 0
Input 2: start coordinate (rowStart, colStart) = (0, 4)
Input 3: destination coordinate (rowDest, colDest) = (4, 4)
Output: true
Explanation: One possible way is : left -> down -> left -> down -> right -> down -> right.
Example 2
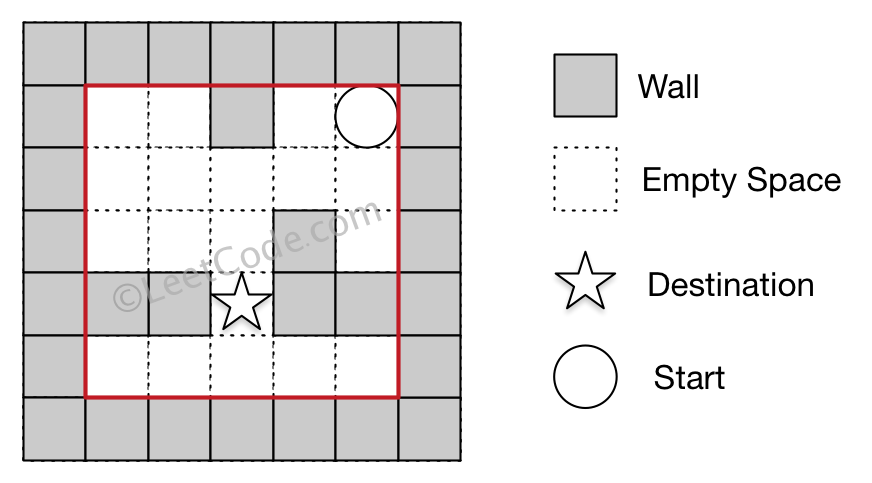
Input 1: a maze represented by a 2D array
0 0 1 0 0
0 0 0 0 0
0 0 0 1 0
1 1 0 1 1
0 0 0 0 0
Input 2: start coordinate (rowStart, colStart) = (0, 4)
Input 3: destination coordinate (rowDest, colDest) = (3, 2)
Output: false
Explanation: There is no way for the ball to stop at the destination.
Note:
- There is only one ball and one destination in the maze.
- Both the ball and the destination exist on an empty space, and they will not be at the same position initially.
- The given maze does not contain border (like the red rectangle in the example pictures), but you could assume the border of the maze are all walls.
- The maze contains at least 2 empty spaces, and both the width and height of the maze won’t exceed 100.
Methodology
Don’t over thinking about this question. The ball will only stop when it touch the wall. So we start from the given point, Pick one of four directions to move the ball from start until it touch the wall, then memorize the end point. Start over again with different directions until we collect all end points for all four directions. Those end points will be the start point for next round again. If any end points is the detination return tree other wise return false
Code(DFS+BFS)
def hasPath(self, maze: List[List[int]], start: List[int], destination: List[int]) -> bool:
row, col = len(maze),len(maze[0])
queue = collections.deque([(start[0],start[1])])
visited = set()
dirs = [(-1,0),(0,-1),(1,0),(0,1)]
def neighbors(x,y):
temp=[]
used = set()
used.add((x,y))
for dx, dy in dirs:
nx,ny = x,y
while 0 <= nx+dx < row and 0 <= ny+dy < col and maze[nx+dx][ny+dy] == 0:
nx+=dx
ny+=dy
if (nx,ny) not in used:
temp.append((nx, ny))
return temp
while queue:
cell = queue.popleft()
if cell in visited: continue
if cell == (destination[0], destination[1]): return True
visited.add(cell)
for neighbor in neighbors(cell[0],cell[1]):
queue.append(neighbor)
return False
BigO
We traversal all elements of the 2D roughly once so time complexity is roughly O(mn) where m is row size and n is column size.